News feed
BME Automated Drive Lab’s website has started
2020. 05. 27.The lab intends to catalyze the acceptance and penetration of self-driving vehicles and related technologies.
The aim of BME Automated Drive Lab is to do cutting-edge R&D activities in the whole spectrum of highly automated and autonomous road vehicles. Our mission is to combine academic and industrial competences to become a globally recognized education and research institution. The lab intends to catalyze the acceptance and penetration of self-driving vehicles and related technologies. Visit our new website for our latest research results and news!
Testing and Validation Team
With the appearance of the advanced driving assistance systems (ADAS) and autonomous vehicles, more complex test situations with more special test equipment are necessary. Based on the feedbacks of the industrial partners significant needs come up for developing diverse test equipment due to the demand for complex scenarios. Another initiative factor is the relatively high purchase price from the market. On the market, only a few suppliers are dealing with such a test device furthermore, the harmonized inputs of industrial stakeholders restrict the functions of these devices, therefore more untapped features are not yet developed. In order to facilitate the testing of the upcoming functions, different fields are researched, and types of equipment are developed on ZalaZONE. In collaboration with university students and trainees, two different dummy target objects were designed and manufactured, which are used for typically AEB tests. One of these objects is a pedestrian dummy. The other is a foam dummy car represented a hatchback category passenger vehicle. For the control and movement of this pedestrian dummy, a belt-driven towing system had been conceived and realized.
Data Management and Communication Team
The data revolution is gaining ground in the world of road-city transport systems. A huge amount of data is generated in an automated transport system. Collecting, organizing, communicating and utilizing a lot of data is a big and critical task. The intelligent use of road/city traffic data offers many opportunities in the development of intelligent transport systems. Our goal is to get involved in this development in a creative and innovative way. We focus on data acquisition and analysis challenges of automatedrive projects, like digital twin scenario (ViL, SciL) implementations. Generated data becomes more valuable, as the artificial intelligence algorithms run on them will result in more efficient operation and better control methods. As data management is an essential part of automated drive developments, our aim is to contribute in local and international intelligent transport R&D projects.
Vehicle Dynamics and Control Team
The main activities of the team includes vehicle and vehicle sub-system modeling, parameter identification, validation and test measurements and vehicle control. Modeling is a useful and cost effective tool for analyzing, tune and develop vehicle systems and their interaction with the environment or with other sensing or control systems installed in the car. The definition and correct implementation is insufficient for the realistic behavior of numeric models, hence, a special emphasis should be put on the parameter identification and validation.
For this purposes, a wide range of measurement equipment is needed. The teams work is supported by various sensors and measurement systems including but not limited to different kinds of dual antenna GNSS systems with RTK correction, a Correvit 2-axis optical sensor, IMU units, strain-gauge measurement system, etc. A direct access to the test platforms of the ZalaZONE Automotive Proving guarantees that a wide variety of test runs can be carried out such as highly dynamic test on the dynamic platform and the handling course as well as on different surface qualities on the braking platform.
Perception Team
The focus of the team relates first of all to problems related to environment perception and understanding, to the research and development of related methods and algorithms. Let us give a brief overview on the main topics of the laboratory.
We develop perception algorithm using neural network architectures (first of all for 3D object detection and end-to-end models) capable of learning from multiple type of data such as LiDAR, RADAR, cameras. Such networks are able to learn the synergies present between different type of data and thus may provide more reliable results, more robust behavior than networks operating on single type of data only. Besides testing our algorithms on publicly available datasets we perform also experiments under real circumstances. For this purpose we have built a measurement vehicle equipped with LiDARS, RADAR, Cameras, dGPS and V2X communication unit which allows us to test our algorithms under real circumstances in real-time.

Modeling and Simulation Team
We build mathematical models for vehicle dynamics and traffic flow. We also support the modeling by state-of-the-art simulation software which are used by the automotive industry as well as by the academic research community. The applied software arsenal consists of Vires, PreScan, IPG CarMaker, dSPACE, Matlab, Python, SUMO, PTV Vissim/Visum, Unity 3D. Beyond the standalone use of these tools, we actively develop and conduct co-simulation frameworks to exploit the simultaneous application. Moreover, we place great emphasis on the mixed-reality and digital twin testing which means that real-world elements (e.g. test car, dummy) are also involved within the simulation. We develop Vehicle-in-the-Loop (ViL) and Scenario-in-the-Loop (SciL) frameworks. ViL basically realizes Hardware-in-the-Loop testing where the hardware is the test vehicle itself communicating online with the simulation software. SciL represents one step forward as it also consists of controlling other environment elements within the mixed-reality testing (e.g. traffic lights are also controlled online from software in the real test track).
Latest research results
First success Autonomous Drifting with BMW M2 (indoor camera) at ZalaZONE proving Ground
https://www.youtube.com/watch?v=9MGLCjEjODI
We have constructed the digital twin of the BME campus parking lot in Unity 3D, based on laser scanning. The model can be used for mixed-reality simulations. Radar sensor detection from a real car is injected directly into the simulation in real-time. Localization of the car is done with a differential GPS.
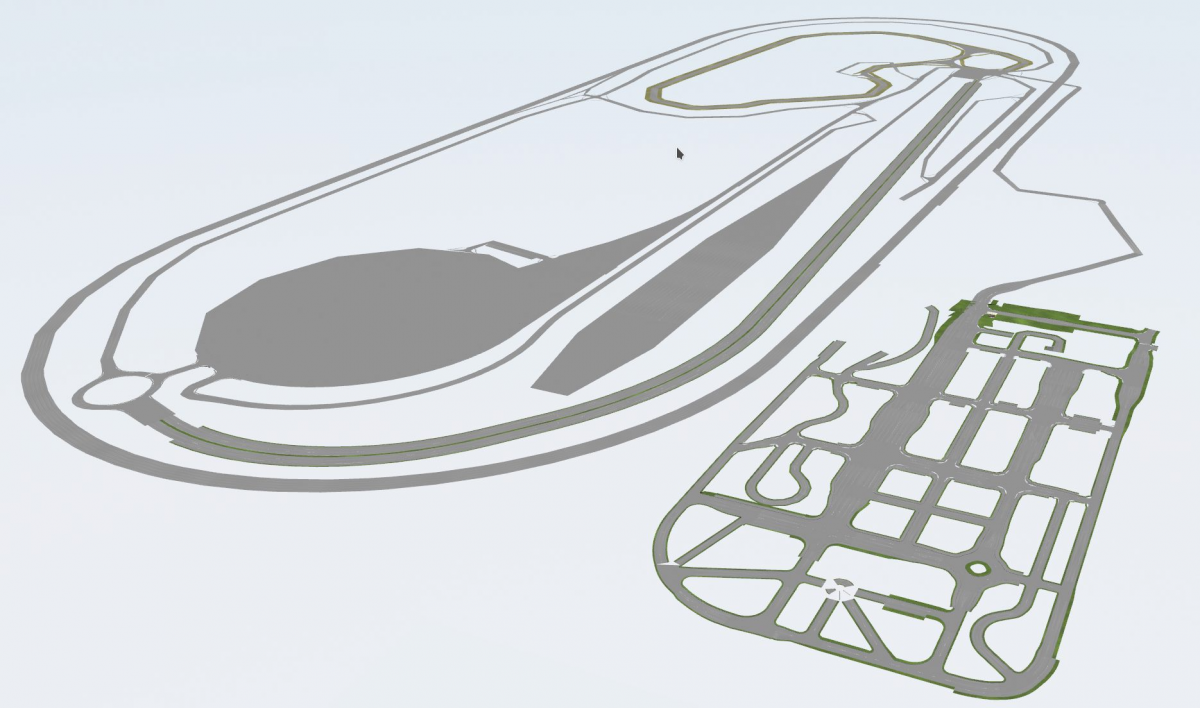
Road models of the ZalaZONE Automotive Proving Ground are available in different simulation software: OpenDrive, IPG CarMaker, PreScan, VTD Vires, Unity 3D, Unreal, SUMO!
https://github.com/…/ZalaZONE-automotive-proving-ground-vir…
The models are ready to use for software based testing of various AD/ADAS applications in a realistic environment.
Feel free to use under MIT license:
https://github.com/BMEAutomatedDrive/ZalaZONE-automotive-proving-ground…
BME Faculty of Transportation Engineering and Vehicle Engineering