Hírfolyam
Idén még nehezebb feladványok várták a RobonAUT versenyzőit
2024. 02. 22.Kalózrobottal és árvízzel is megküzdöttek a műegyetemi mérnökhallgatók autonóm, önműködő járművei az idei RobonAUT döntőben.
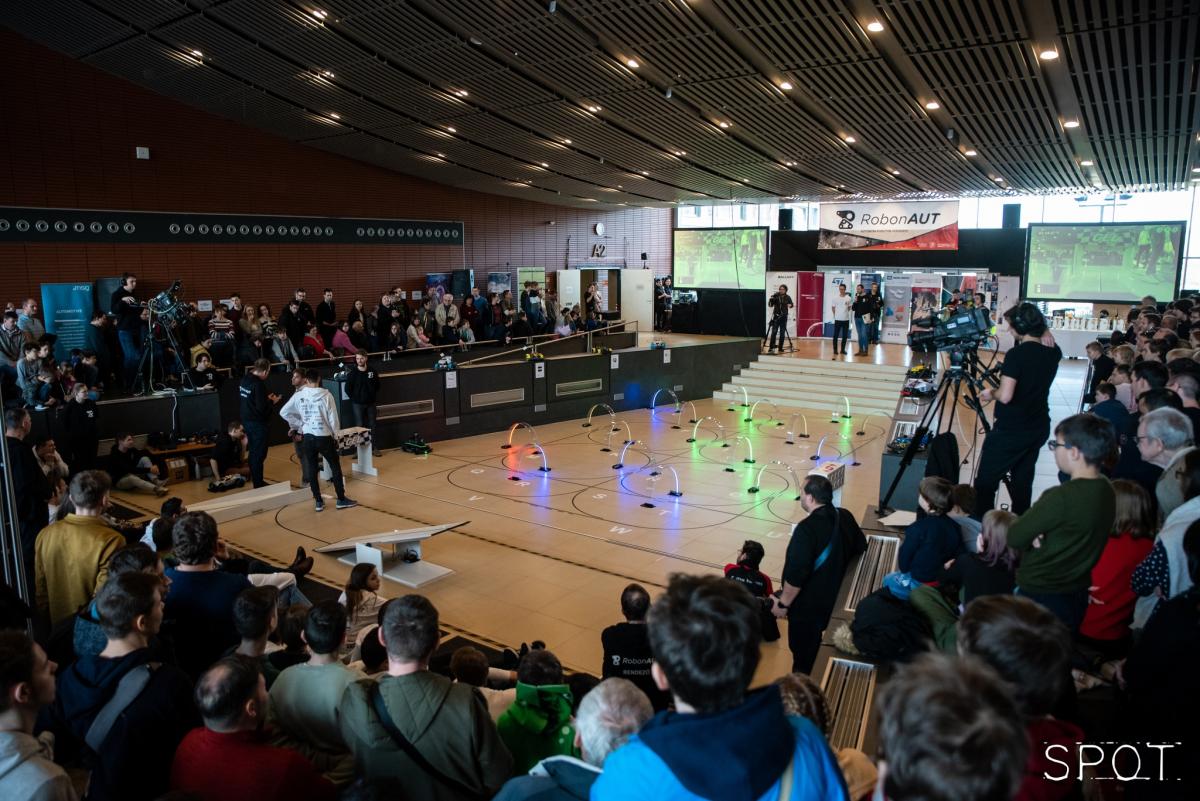
Ismét RobonAUT rajongókkal telt meg a „Q” épület aulája: 2024. február 10-én (szombaton) immáron 15. alkalommal rendezték meg az autonóm robotjárművek versenyének döntőjét.

A rendezvényt Tevesz Gábor főszervező, a RobonAUT egyik alapítója, valamint a BME Villamosmérnöki és Informatikai Kar (BME VIK) Automatizálási és Alkalmazott Informatikai Tanszék címzetes egyetemi tanára nyitotta meg. A versenyző csapatokat és a megmérettetés érdeklődőit köszöntve elmondta, hogy másfél évtizeddel ezelőtt fiatal kollégáival egy olyan kihívást hívtak életre, amelyben az akkor indult villamosmérnök mesterképzés hallgatói a gyakorlatban is megmutathatják, mit tanultak az egyetemen. „Az elmúlt 15 évben rengeteg változáson és fejlődésen ment át a RobonAUT, ahogyan a verseny során alkalmazott technológiák is rohamléptékben fejlődtek. Ma már a hallgatóknak sincs olyan ’könnyű’ dolguk, mint az első versenyzőknek, a feladatok jóval komplexebbek, nehezebbek az előző évek feladványainál” – fogalmazott Tevesz Gábor. Megnyitója zárásaként köszöntötte azokat a vállalatokat és képviselőiket is, akik már évek óta vagy akár új szponzorként támogatják a versenyt, nem mellesleg szükségük van arra a szakembertudásra, amellyel a karon végző, illetve a versenyen induló mérnökhallgatók rendelkeznek.


|
BME VIK RobonAUT megrendezésének ötlete eredetileg Tevesz Gábor címzetes egyetemi tanár és doktoranduszokból álló csapatának egyik találkozóján vetődött fel 2009-ben. Az alapgondolatot az Eurobot nemzetközi robotikai verseny adta, de kapcsolódik a karon mesterképzésben tanulók „Robotirányítás rendszertechnikája” című tantárgyához is. A megmérettetéssel az egyetem célja a hallgatók gyakorlati ismereteinek bővítése mellett a vállalati szektor képviselőivel való kapcsolatteremtés is. A kurzus elvégzésére évről évre javarészt villamosmérnök, mérnökinformatikus és mechatronikai mérnök szakos hallgatók vállalkoznak, akik 3 fős csapatokban alkotnak egy fél éven át közösen dolgozó formációt.
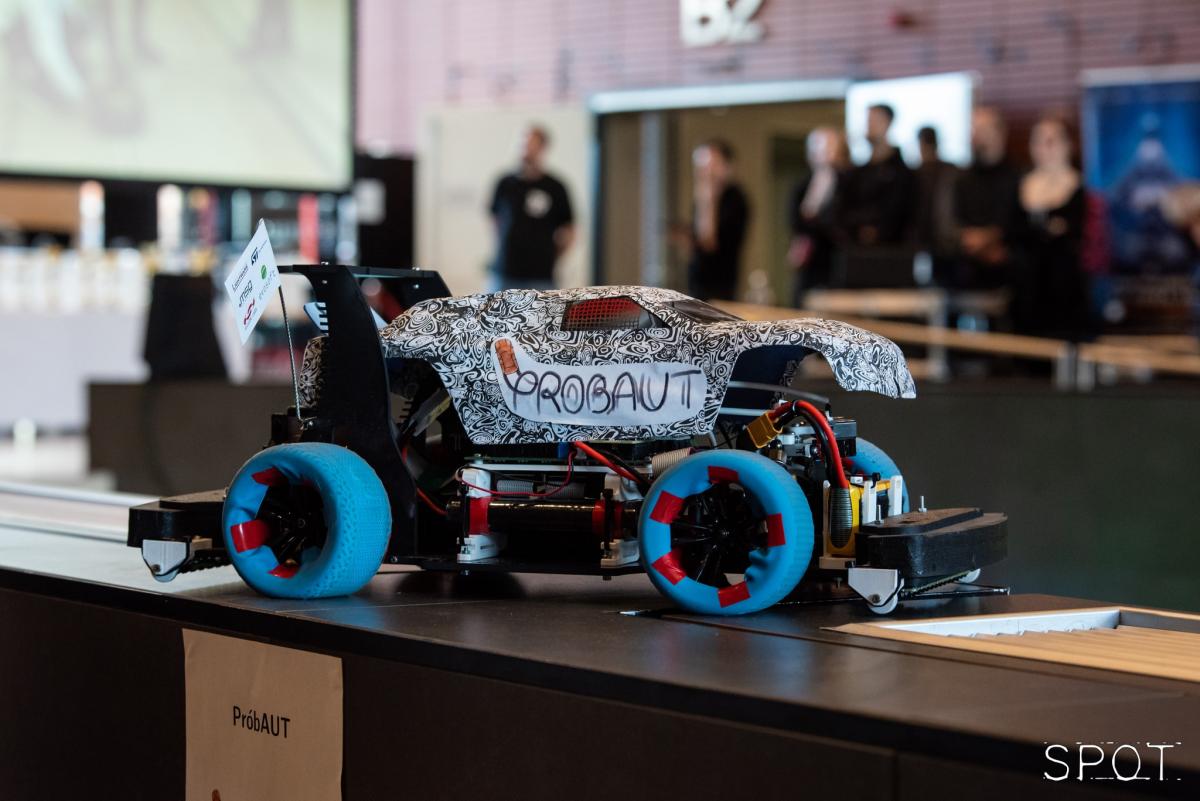
A kihívás lényege, hogy a versengő csapatoknak úgy kell átalakítaniuk egy modellautót, hogy az képes legyen emberi beavatkozás nélkül, a lehető legrövidebb idő alatt teljesíteni egy ügyességi akadálypályát és egy gyorsasági versenyfutamot. A feladatok részletes leírása megtalálható a verseny honlapján. A kezdetek óta közel 200 hallgatói csapat (3 fős) vett részt a versengésben, többen közülük mára már a szakmai megmérettetést támogató vállalatok munkatársai, fejlesztői lettek. |
A 2024-es döntőre 9 csapat kvalifikálta magát: 6 junior és 3 senior formáció mérkőzött meg egymással a különböző futamokban, ahol összesen 110 pontot szerezhettek a hallgatók. A versenyzők közel fél évet dolgoztak az autonóm robotjármű megtervezésén és megalkotásán. Megérte a befektetett munka, ugyanis a kvalifikáció során összegyűjtött pontok is számítottak: összesen 10 pontot lehetett szerezni a felkészülés alatt nyújtott teljesítményből. A szurkolók is segíthették kedvenceiket: a közönségdíjasoknak max. 10 pont járt a külcsínért.



A döntőben idén is gyorsasági és ügyességi kategóriában kellett helyt állniuk az önállóan működő (autonóm) járműveknek. A csapatok mindössze egy percet kaptak arra, hogy előkészítsék versenyautóikat a két, egymás után következő futamra.
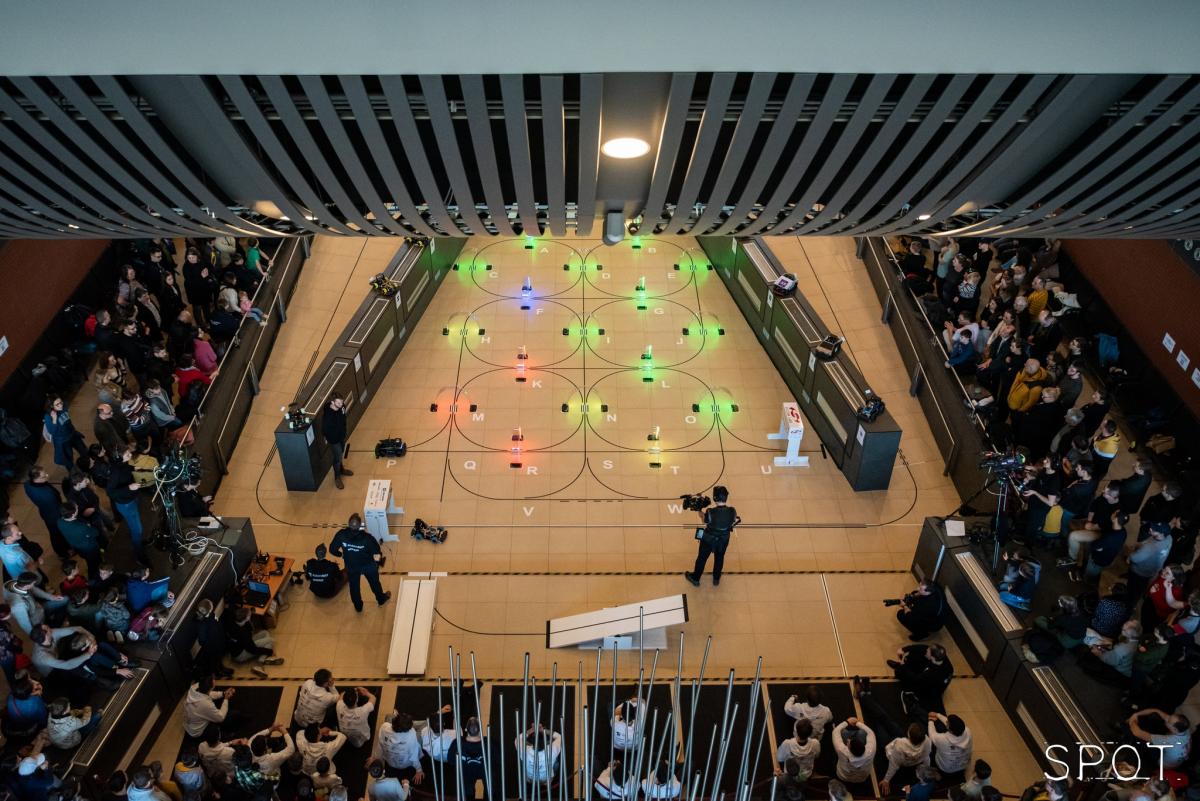
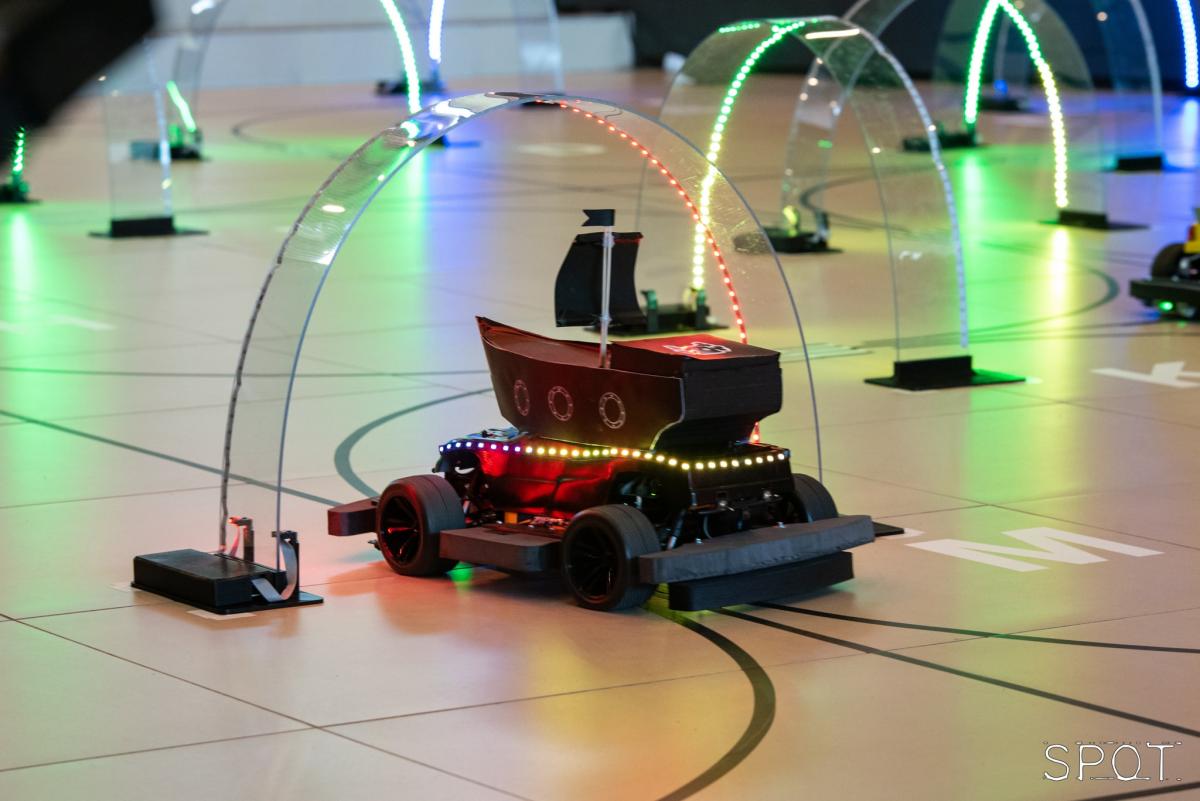
A „Q” épület aulájában felállított ügyességi pálya úthálózatát (labirintust) előre ismertették a versenyzőkkel. A robotautókat egy rádiós startkapu segítségével indították útjukra. Az autóknak a pálya csomópontjai mentén található kapukat (összesen 17 db) kellett felfedezniük és a lehető leggyorsabban bejárniuk a labirintust. A feladványt több „akadályozó” is nehezítette: ki kellett kerülni a pályán lassú, ám folyamatos mozgásban lévő kalózrobotot. Ha a kalózrobot már áthaladt egy kapu alatt, akkor csökkent az adott kapu érintéséért járó pontszám is (2 pont/kapu). A kalózrobot mindenkori pozícióját a szervezők rádiójelekkel sugározták.
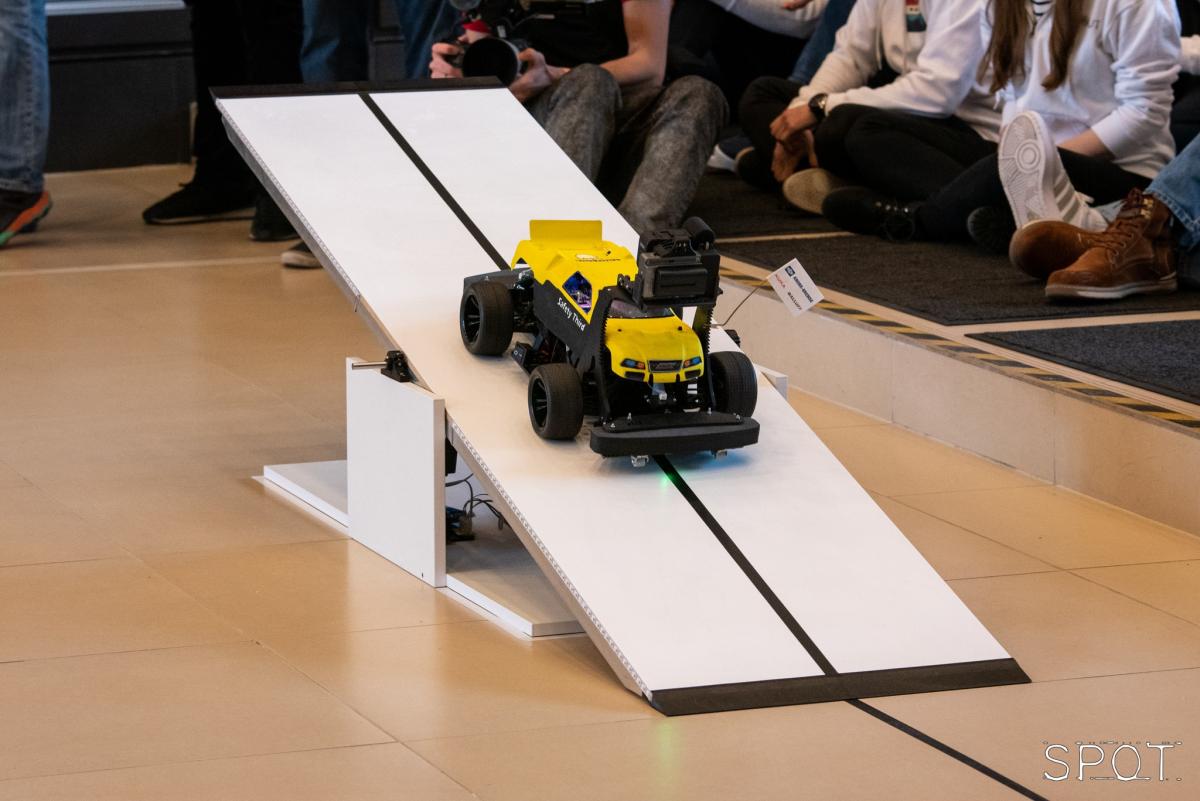
További nehézség volt, hogy a futam egy adott pillanatában „árvíz” öntötte el a pályát, ami blokkolta a kapukat, vagyis azok érintéséért ideiglenesen nem járt pont, ilyenkor a kalózrobot is egyhelyben állt. Az „árvizet” egy képzeletbeli zsilip, vagyis egy libikóka segítségével lehetett semlegesíteni: a robotautóknak fel kellett menniük a rámpán, majd átbillenteni a libikókát. Ezzel megszűnt az „árvíz”, elindult a kalózhajó, és a kapu érintéséért újból járt a megérdemelt jutalompont. A további manővereket is értékelték a szervezők: a libikókán való sikeres egyensúlyozásért 10 pontot, a sávváltásért 6 pontot adtak. Ha a csapattagoknak be kellett avatkozniuk a versenybe, azért viszont alkalmanként 5-5 pont levonása járt. Az ügyességi kört a rendezők akkor tekintették teljesítettnek, ha elfogytak az érintendő kapuk vagy lejárt az 5 perces időkeret.



A gyorsasági pályán a legjobb köridő elérése a volt a cél: maximum 6 kört tehettek meg az autók, amelyek közül a leggyorsabb számított az értékelésnél. A robotautók egy önmagába záródó vezetővonalat önállóan követtek, és itt is számolniuk kellett a gyorsulást hátráltató pályaszereplőkkel. Együtt mozogtak az ún. „safety carral”, amelyet meg kellett előzni, kikerülni a minél gyorsabb köridőre törekvő versenyautóknak. A safety car követéséért 6 pont, kétszeri megelőzéséért összesen 10 pont járt. A pálya nyomvonalát és a gyorsításra kiváló lehetőséget adó egyenes szakaszok helyét a hallgatók a döntő előtti napokban megismerhették. A külső segítséget itt is büntették: alkalmanként 2 pont levonás járt az emberi beavatkozásért.

|
A RobonAUT 2024 hallgatói mérnökverseny eredményei
A junior csapatok kategóriájában a következő csapatok állhattak fel a dobogóra:
Junior 1. helyezett: AUTofRange (Kazup Dániel, Kovács Tamás Barnabás, Petrőtei Tamás József - MSc mechatronikai mérnök)
Junior 2. helyezett: Safety Third (Csermák Ádám Barna, Horváth Máté, Kis Mihály Bence - MSc villamosmérnök)
Junior 3. helyezett: WorkAUT (Fent István, Garad Ágoston, Vepperi Virág – MSc villamosmérnök)
Az összesített 1. helyezést szintén a junior kategória győztese, az AUTofRange csapat szerezte meg, díjuk egy Lamborghini élményvezetés lett.
A legtöbb közönségszavazatot a Safety Third csapat kapta.
|

A megmérettetésre vállalkozó fiataloknak minden évben komplex, több műszaki, mérnöki területet is érintő tudásról kell tanúbizonyságot tenniük. Ismerniük kell a mikrokontrollerek, a szenzorok vagy az áramkörök világát, szükségük van irányítástechnikai, automatizálási és programozási ismeretekre is. A verseny révén (is) szert tehetnek olyan elméleti és gyakorlati tudásra, amelynek forintra váltható hasznát vehetik majd az álláskeresés során olyan vállalatoknál is, amelyek autonóm járművek fejlesztésével vagy robotikával foglalkoznak.
Az elkövetkezendő évek technológiai forradalmának egyik fontos sarokpontja egyebek mellett az önműködő robotjárművekben rejlő lehetőségek kiaknázása. A kutatók prognózisa szerint az egészségügy, a járműipar és a logisztika után a mindennapokban is általánossá válhat az emberi beavatkozást nem igénylő gépezetek megjelenése. E dinamikusan fejlődő tudományterületet a hazai felsőoktatási intézmények közül elsőként helyezi középpontba a BME, amely évek óta tudatosan nyomon követi a robotika újításait, ami a műegyetemi mérnökképzésen gyakorlati ismeretek formájában is megjelenik.
A közvetítés teljes terjedelmében visszanézhető a rendezvény honlapján, az esemény érdekes szemelvényeiből a videók menüpont alatt látható válogatás.
Az eseményről készült fotók a SPOT Fotókör honlapján is elérhetők.
TZS-KJ
Fotók forrása: SPOT Fotókör