Hírfolyam
A Műegyetem forradalmi járműipari újításai mutatkoztak be a ZalaZONE-on
2022. 01. 25.A BME hat karán huszonöt projekten dolgoznak a kutatók a tesztpályához kötődő és egymáshoz is szorosan kapcsolódó fejlesztéseken.
A 2022. január 15-én a ZalaZONE Járműipari Tesztpályán megrendezett szakmai napon a BME és a ZalaZONE kutatás-fejlesztési és innovációs együttműködése keretében zajló kutatások részleteinek és eredményeinek bemutatására került sor húsz egységből álló asztali és poszterkiállítás, valamint tizennégy bel- és kültéri demonstráció keretében. A rendezvény tartalmának és a bemutatott kutatási projektek eredményeinek összefoglalása a BME Közlekedésmérnöki és Járműmérnöki Kar honlapján elérhető kiadványban olvasható. A BME-ZalaZONE Szakmai Napon a Műegyetem hat karának kutatói képviseltették magukat és mutatták be a tesztpályához kötődő tudományos kutatásaik eredményeit. A bemutatott projektek egyedülállóan szerteágazóan ismertették a BME-n futó járműipari projekteket. A bemutatott fejlesztések között a járműveket a tesztpályán nyomon követő műholdas helymeghatározás, valamint szenzorrendszer, illetve a fémes alkatrészek fejlesztéséhez kapcsolódó megoldások, továbbá szélvédőre vetítő gépjármű kijelző kifejlesztése is szerepelt. Ezeken kívül, a szakértők ismertették a BME autonóm járműves szolgáltatások szabályozásával, valamint a tesztpálya dekarbonizációs lehetőségeivel, illetve az anyagmozgató rendszerekkel, az önvezető minibuszokkal, és a különböző üzemanyagok hatásainak vizsgálatával összefüggő kutatásaikat is.
A ZalaZONE Járműipari Tesztpálya ötletének megszületésekor, a 2010-es évek közepén a Budapesti Műszaki és Gazdaságtudományi Egyetem szervezésében jött létre egy hazai és nemzetközi iparági szereplőkből, valamint akadémiai kutatókból álló munkacsoport, amelynek feladata volt egy autonóm járműipari tesztpálya részletes specifikációjának összegyűjtése és kidolgozása. Ennek során a munkacsoport meghatározta azokat a követelményeket, amelyek a tesztpályát kifejezetten alkalmassá teszik a hálózatba kapcsolt és automatizált járművek tesztelésére, illetve azokat a szükséges funkciókat, amelyek révén az iparvállalatok szívesen használják a pályát tesztelési célokra. A tesztpályát építtető cég, kisebb módosításokkal, a szakemberek által akkor megálmodott koncepciót valósította meg. A pálya építése a koronavírus járvány okozta nehézségek ellenére megfelelő ütemben haladt, így a teljes műszaki átadásra 2022 tavaszán kerül sor.

A ZalaZONE tesztpálya távlati képe
Amint arról a bme.hu korábban hírt adott, 2022. január 15-én a BME rektora, kancellárja, rektorhelyettesei, kancellárhelyettese és dékánjai látogatást tettek a zalaegerszegi ZalaZone járműipari tesztpályán.

Dr. Farkas Zsolt előadása a versenyutókba fejlesztett és beépített speciális alkatrészekről
(BME-ZalaZONE Szakmai Nap, 2022. január 15.)
A látogatás célja az volt, hogy a BME vezetése átfogó képet kapjon arról az innovációs ökoszisztémáról, ami a ZalaZONE járműipari tesztpálya körül jelenleg épül. A résztvevők a BME-ZalaZONE Szakmai Napon beszélgetést folytattak arról, hogy a BME hogyan tud még jobban illeszkedni ebbe az innovációs környezetbe. Az előadások és a BME eddigi, a tesztpályához kapcsolódó K+F+I munkáját tárgyaló poszterbemutatók megtekintése után a BME delegációja a tesztpályán bejáráson is részt vett. A nap folyamán elhangzott, a BME már most is a tesztpályán zajló műszaki tudományos tevékenység 60%-ának hátterét adja, így célszerűen adódik a további szoros együttműködés a ZalaZone és a Műegyetem között.
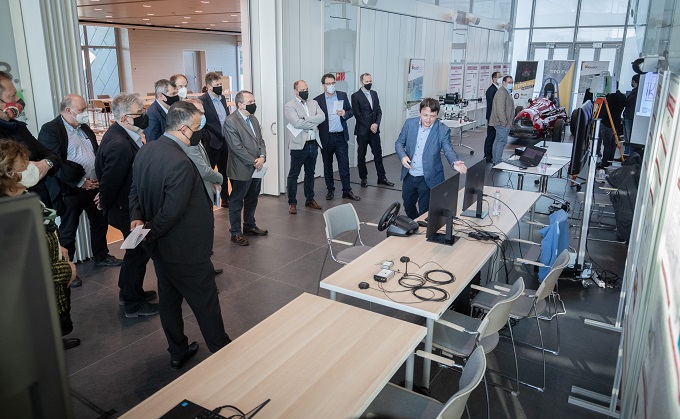
Dr. Aradi Szilárd a gépi tanulási módszerrel tervezett útvonalkövetési megoldást mutatja be
(BME-ZalaZONE Szakmai Nap, 2022. január 15.)
![]()
A Tracker Applikáció bemutatása működés közben a ZalaZONE irányítóközpont videofalán
(BME-ZalaZONE Szakmai Nap, 2022. január 15.)
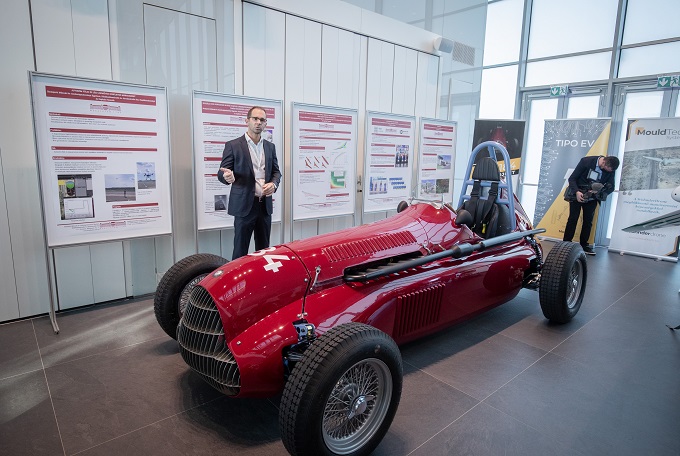
Dr. Rohács Dániel poszterelőadása a drón technológiai kutatások eredményeiről a Tipo184 mellett
(BME-ZalaZONE Szakmai Nap, 2022. január 15.)

Az autonóm driftelésre képes jármű „akció közben”
(BME-ZalaZONE Szakmai Nap, 2022. január 15.)

Bárki kipróbálhatta milyen egy valós járművet távolról vezetni a „teleoperáció” segítségével
(BME-ZalaZONE Szakmai Nap, 2022. január 15.)
A BME-ZalaZONE Szakmai Nap demonstrációi
Villamosmérnöki és Informatikai Kar
Moving platform control
Kutatásvezető: Dr. Kiss Bálint, egyetemi docens, tanszékvezető Irányítástechnika és Informatika Tanszék
A ZalaZONE-hoz kapcsolódó kutatások célja egy tejes mértékben saját fejlesztésű, autonóm manővervégrehajtásra képes, távirányítható, villamos hajtású platform kialakítása. A platform egyes mesterséges forgalmi elemek (gyalogos, kerékpáros, jármű, stb.) pontos és előírtan ütemezett mozgatását végzi a különböző tesztesetekhez. A VIK kutatócsoportja a platform vezérlési és autonóm funkcióin dolgozik.
ZalaZONE Tracker applikáció (valós idejű tesztjármű követés)
Kutatásvezető: Dr. Ekler Péter egyetemi docens, Automatizálási és Alkalmazott Informatikai Tanszék
A Tanszék bemutatta a ZalaZONE Tracker rendszerrel kapcsolatos már elérhető funkciókat, a kapcsolódási területeket más projektekkel és az aktívan zajló kutatási területeket. A Tracker rendszer célja, hogy minden a tesztpályára felhajtott jármű valós időben nyomon követhető legyen.
GNSS referenciaállomás kiépítése, integrálása a hazai és az európai GNSS hálózatba
Kutatásvezető: Dr. Rózsa Szabolcs egyetemi docens, dékán, tanszékvezető, Általános- és Felsőgeodézia Tanszék
Az Általános- és Felsőgeodézia Tanszék munkatársai kiépítettek egy műholdas helymeghatározáshoz kapcsolódó kiegészítő szolgáltatást, amellyel a tesztjárművek helyzetüket valós időben néhány centiméter pontosan képesek meghatározni.
HD térkép és felületmodellezése, terepi felmérése
Kutatásvezető: Dr. Lovas Tamás egyetemi docens
A Fotogrammetria és Térinformatika Tanszék különböző lézerszkennelési eljárásokkal nagyfelbontású, nagypontosságú pontfelhőket állított elő több pályaelemről, amelyek segítségével megalkották ezek pontos felületmodelljeit.
Útburkolatok felmérése, minősítése
Kutatásvezető: Dr. Takács Bence egyetemi docens
Előadó: Dr. Tuchband Tamás adjunktus
Az Általános- és Felsőgeodézia Tanszék munkatársai egy útburkolat felmérési eljárást mutattak be, amelyben 3D adatnyerési eljárásokkal (mérőállomással, lézerszkennerrel és UAV fotogrammetriával) végezték el egy megépült útszakasz geometriájának minősítését.
Mozgó járművek nagypontosságú hely-, és helyzetmeghatározása GNSS, IMU és egyéb szenzorok fúziójával
Kutató: Farkas Márton doktorandusz
A SZTAKI és a BME Általános- és Felsőgeodézia Tanszék együttműködésében költséghatékony szenzorok (GNSS vevő, IMU, barométer) felhasználásával fejlesztenek az autonóm járművek számára hely- és egyúttal helyzetmeghatározásra is alkalmas nagy pontosságú szenzorrendszert.
Dr. Farkas Zsolt adjunktus: Formula Student Teams
Az innováció egyik mozgató rugója a fiatalok, a hallgatók. A BME versenycsapatai (BME Formula Racing Team és BME Motorsport) 2008 óta vesznek részt nemzetközi versenyeken. A ZalaZONE járműipari tesztpálya egyedülálló lehetőséget biztosít a járművek teszteléséhez, az optimális működési paraméterek beállításán túl a szimulációs modellek validálásáig.
Dr. Markovits Tamás: Generatív tervezésű additív gyártástechnológiával készülő titánból nyomtatott futómű elem tervezése és tesztelése ZalaZONE-on
A BME Formula Racing Team (FRT) csapat versenyjárműve esetében felmerült az igény fémes alkatrészek fejlesztésénél korszerűbb megoldások alkalmazására. A közös kutatás során a fém kidolgozásra került egy olyan módszertan, amely az alkatrészek kiválasztásától, a generatív tervezéssel történő megtervezésén és a fém 3D-s nyomtatási folyamat lépéseinek kialakításán keresztül, az alkatrész célirányos tesztelésig a jövőben lehetővé teszi a fémes alkatrészek hatékonyabb fejlesztését.
Széles látószögű, lapos képernyős Head-up display rendszer
Kutatásvezető: Dr. Koppa Pál egyetemi tanár, Atomfizika Tanszék
A projekt célja egy új, lapos képernyőn alapuló Head-Up Display (szélvédőre vetítő gépjármű kijelző) kifejlesztése, amely képméretében és képminőségében lényegesen meghaladja a technika jelenlegi állását.
Gazdaság- és Társadalomtudományi Kar
A BME „spin-off” alapítási tevékenységének előkészítése és az első „spin-off”-ok alapítása
Kutatásvezető: Dr. Grad-Gyenge Anikó hab. egyetemi docens, tudományos és innovációs dékánhelyettes, tanszékvezető Üzleti Jogi Tanszék
A GTK a KJK-val szoros együttműködésben dolgozik az Egyetem első spin-off vállalkozásai létrehozásának támogatásán.
Autonóm járműves mobilitási szolgáltatás társadalmi és jogi kérdései
Kutatásveztő: dr. Csiszár Csaba és dr. Nagy Krisztina
A GTK-KJK Társadalmi elfogadottság kutatócsoport jogi ága a KJK kutatói által modellezett autonóm járműves mobilitási szolgáltatással összefüggésben három témakörben végez kutatást. Az általános jogi vizsgálat célja az autonóm járműves mobilitási szolgáltatásra vonatkozó szabályozási megoldások feltérképezése.
A ZalaZONE tesztpálya karbonlábnyoma és dekarbonizációs lehetőségei
Kutatásvezető: Dr. Pálvölgyi Tamás egyetemi docens, tanszékvezető, Környezetgazdaságtan Tanszék
A zalai tesztpálya Európában egyedülálló, háromlépcsős karbonmentesítési koncepcióját dolgozták ki a Környezetgazdaságtan Tanszék oktató-kutatói.
Közlekedésmérnöki és Járműmérnöki Kar
Drone conflict management, DroneMotive Kompetencia Központ, Drone Weather Center, Magyarországi Drón Koalíció, MouldTech Systems Kft-vel együttműködésben: Fiat Tipo 184
Kutatásvezető: Dr. Rohács Dániel docens, tanszékvezető, Repüléstudományi és Hajózási Tanszék
A Tanszék a teljes innovációs folyamatot lefedő projektekről számolt be: elsőként egy drón és autonóm légijármű közötti aktív konfliktus management rendszert, majd kísérleti fejlesztésként további két projektet bemutatva. Az egyikben a BME feladatai alapvetően egy merevszárnyú drón továbbfejlesztését, potenciális üzleti modellek kidolgozását célozza, míg a másik egy drón alapú meteorológiai rendszer üzleti hasznosítását vizsgálja.
Autonóm Shuttle Bus integrációja a közösségi közlekedésbe
Kutatásvezető: Dr. Tóth János egyetemi docens, tanszékvezető, Közlekedéstechnológiai és Közlekedésgazdasági Tanszék; Dr. Lakatos András tudományos munkatárs, Közlekedéstechnológiai és Közlekedésgazdasági Tanszék, Tóth Bálint doktorandusz Gépjárműtechnológiai Tanszék
A kutatás az alacsonysebességű önvezető minibuszok igényvezérelt közlekedésben történő alkalmazhatóságának feltételrendszerét vizsgálja, az ezzel kapcsolatos elvégzendő előzetes feladatokat határozza meg, ezáltal előkészítve egy még világviszonylatban unikális alkalmazás közeljövőben történő létrehozását Magyarországon.
Trajektóriatervező megoldások gépi tanulási alapokon – Nagy pontosságú, GNSS-alapú lokalizációs rendszer fejlesztése
Kutatásvezető: Dr. Aradi Szilárd egyetemi docens, Közlekedés-és Járműirányítási Tanszék:
Az Autonóm Rendszerek Nemzeti Laboratórium járműirányítási tématerületén több egymásra épülő kutatással foglalkozik a BME. Ennek során, többek között, egy kettős sávváltási manőver pályájának meghatározására és végrehajtására alkalmas módszer kifejlesztése történt meg.
Modellezés és szimuláció, Traffic Simulation
Kutatásvezető: Dr. Tettamanti Tamás egyetemi docens, Közlekedés-és Járműirányítási Tanszék
A BME feladatainak egyike a ZalaZONE tesztpálya modelljeinek elkészítése annak megosztása a világhálón. A BME kutatói ingyenesen letölthetővé tették a tesztpálya lidarral felmért pontfelhő adatát, HD-térképét, 3-féle szimulátormodelljét, kettő 3D-megjelenítő modelljét, továbbá még az M86-os autópályán végzett tesztmérés adatait is. A feladatok másik fókusza a ZalaZONE tesztelési környezet fejlesztése autonóm járműtechnológiák számára forgalomszimulációs szoftverek integrálásával és az ún. kevert valóság („mixed reality”) technológia alkalmazásával.
Kültéri ipari szállítójármű teleoperációs funkciójának fejlesztése és tesztelése 5G-s hálózaton keresztül
Dr. Bohács Gábor tanszékvezető helyettes, egyetemi docens, Anyagmozgatási és Logisztikai Rendszerek Tanszék
Az iparban használt speciális anyagmozgató gépek alkalmazása elkerülhetetlen. Az ipari termelés volumenének további növeléséhez pedig az anyagmozgató rendszerek kapacitásának emelése is elengedhetetlen feltételt jelent. A kutatás alapfelvetése, hogy a meglévő gépekből kiindulva, autonóm és emberrel kollaboráló funkciókat kell fejleszteni. A kutatás során a BME szakértői egy nagy teherbírású ipari vontatóra telepítettek mechatronikus rendszert, mely a kezelő funkcióit (gáz- és fékpedál megnyomása, kormányzás) el tudja végezni.
Central System Real Time Digital Twin
Dr. Tihanyi Viktor egyetemi docens, Gépjárműtechnológia Tanszék
A BME KJK fejlesztése a Central System nevű felhőalapú rendszer a lekorszerűbb state-of-art technológiákat integrálva az infrastruktúrába kihelyezett szenzorok nyers és magasabb szintű adatait felhasználva támogatja az autonóm járművek tesztelését és üzemeltetését, különös tekintettel a környezetérzékelésre és a járművek központi irányítására.
A V2V kommunikáció biztonsági kockázatközpontú elemzése, különös tekintettel a kibertámadásokra érzékeny hálózati teljesítményre és a járműdinamikai tényezőkre
Dr. Török Árpád, csoportvezető, tudományos főmunkatárs, Gépjárműtechnológia Tanszék
A jövő intelligens közlekedési rendszerei (ITS) várhatóan hálózatba kapcsolt és nagymértékben automatizált módon fogják támogatni a mobilitási folyamatokat. A vezeték nélküli kommunikációs folyamatok megbízhatósága és kiberbiztonsága új kihívások elé állítja az autóipart. A kutatás célja, hogy átfogó módon értékelje a szándékos (kibertámadás) és nem szándékos kommunikációs hibák közlekedésfolyamatokra gyakorolt hatását. Ennek megfelelően új módszert dolgoztak ki a szakértők az egyes járművek közötti V2V alkalmazások biztonsági kockázatának jellemzésére.
Fejlett alacsony széndioxid kibocsátású alternatív üzemanyagok égés- és tárolás optimalizációja (IMP-ADAFCO)
Kutatásvezető: Dr. Zöldy Máté csoportvezető, tudományos főmunkatárs, Gépjárműtechnológia Tanszék
A fejlett folyékony üzemanyagok szükségesek a mobilitás alacsony környezetterhelésének eléréséhez a meglévő motoroknál, nagyméretű járműveknél és a biztonságkritikus rendszereknél. Különböző üzemanyagok hatásainak vizsgálatával, egy mesterséges intelligencia (MI) alapú tüzelőanyag-fejlesztő keretrendszer megalkotásával, illetve a tüzelőanyagok tárolástechnikájával foglalkoznak a BME KJK kutatói többek között a MOL Csoporttal, a Karlsruhe Institute of Technology-val együttműködve.
Central System Scenario in the Loop testing Control
Kutatásvezető: Dr. Tihanyi Viktor egyetemi docens, Gépjárműtechnológia Tanszék
A Scenario-in-the-Loop (SciL) egy a BME által kifejlesztett autonóm jármű tesztelési módszertan, amely a szimulációs környezetet párosítja a valós környezettel. Ez azt jelenti, hogy a valós járművek képesek hatni a szimulációs járművekre és fordítva.
Teleoperation, Automatizált eszközök felhő alapú kontrollja
Dr. Tihanyi Viktor egyetemi docens, Gépjárműtechnológia Tanszék
Az Autonóm Rendszerek Nemzeti Labor projekten belül a BME Anyagmozgatási és Logisztikai Rendszerek Tanszék valamint a Gépjárműtechnológia Tanszék illetve a ZalaZONE munkatársai által létrehozott fejlesztés alapfelvetése, hogy a meglévő gépekből kiindulva, autonóm és emberrel kollaboráló funkciókat kell fejleszteni.
Autonóm járművek járműdinamikai határon történő irányítása
Kutatásvezető: Dr. Bárdos Ádám tudományos munkatárs, Gépjárműtechnológia Tanszék
A kutatással a BME Automated Drive csapata a jövőbeli ESP rendszerek új generációjának kifejlesztéséhez és a közlekedés biztonságának javításához járul hozzá.
BME Közlekedésmérnöki és Járműmérnöki Kar – Rektori Kabinet Kommunikációs Csoport
Fotó: ZalaZONE